浅谈掘进机电动机过载保护的算法优化
2021-09-06 13:04:30 来源:安科瑞王蒙蒙
 摘要:对于掘进机电动机的过载保护,宜采用反时限保护的思想,为在微机计算中实现该思想,引入电流―时间关系式,从而引入发热常数K;然后根据少量已知的电动机过载保护要求,求得K值的保护限值;对K值进行累加计算,当K值超过限值时即发出电动机保护指令。现对优化后的微机算法代码进行举例说明,该算法相较于传统的分段式算法更为准确,特别是对于动态过载的情况,其效果尤为明显。
关键词:电动机;过载;微机;反时限;算法
0引言
对电动机的保护应将温度保护和热(电流)保护两者结合,组成温度―电流保护,这是一种比较理想的过负荷保护方式。目前,以微机为基础的热(电流)保护,以其处理数据灵活、适用范围广等特点,得到了越来越广泛的应用。本文主要讨论以微机为基础的悬臂式掘进机的电动机热(电流)保护算法。
1标准算法
矿用悬臂式掘进机电控系统执行标准《悬臂式掘进机电气控制设备》(MT/T971―2005),其中要求对掘进机电动机的过载短路保护应符合表1的规定。
表1
若按照表1所列数据执行,对于1.20倍过载保护和1.50倍过载保护,在微机上的ST语言代码表达如下:
IFCurrent_real>(Current_rated*1.20)THEN
Mid_120:=TRUE;
ELSE
Mid_120:=FALSE;
END_IF
TON_120(IN:=Mid_120,PT:=T#1200S);
IFTON_120.QTHEN
Overload_current_120:=TRUE;
END_IF(*1.2倍过载1200s*)
IFCurrent_real>(Current_rated*1.50)THEN
Mid_150:=TRUE;
ELSE
Mid_150:=FALSE;
END_IF
TON_150(IN:=Mid_150,PT:=T#180S);
IFTON_150.QTHEN
Overload_current_150:=TRUE;
END_IF(*1.5倍过载180s*)
IFOverload_current_120OROverload_current_150THEN
Motor_stop:=TRUE;
ELSE
Motor_stop:=FALSE;
END_IF(*过载后电动机停止*)
IFResetTHEN
Overload_current_120:=FALSE;
Overload_current_150:=FALSE;
END_IF(*复位*)
备注:Current_real―实时电流;Current_rated―额定电流(整定电流);Mid_120―1.2倍过载计算的中间变量;Overload_current_120―1.2倍过载;Motor_stop―电动机停止;Reset―复位。
对于表1所述及其在微机上的算法,有两个问题:
(1)在1.5倍至6倍过载之间,数据缺失,没有2倍、3倍、4倍、5倍等过载的动作时间。
(2)算法不够合理。掘进机负载是一直变化的,电流也随之变化,过载倍数也是一直变化的,那么过载保护的时间也应当是实时变化的,上文分段式算法无法准确反映动态过载的情况。
2算法优化
对于电流频繁变化的电动机宜采用反时限电流保护。采用反时限电流保护方法,首先要建立电流―时间的关系式。
电动机短时过负荷时,发热时间短,发热量大,电动机绕组在发热时与铁芯间存在热绝缘,且铁芯质量大而发热缓慢,所以短时过负荷状态的电动机的发热状态应由绕组发热时间常数T′决定。
额定稳态后的过载保护时间可用下式表示:
式中,t为额定稳态后的过载保护时间(s);θn为额定稳态温升(℃);Δθ为超出θn的温升(℃);Tn′为额定稳态时的绕组发热时间常数(s);IZ为电流倍数,IZ=I/In。
变形得:
令:
则过载电流倍数与保护时间的关系式为:
K=(IZ2-1)t
采用反时限过流保护算法时,绕组发热时间常数T′一般应由电动机制造商提供,但国内制造商一般都不提供此数据,我们可以根据制造商提供的其他数据或相应标准来计算。
有多种方法可以计算K值大小,我们可以根据已知的电动机过载负荷能力对K值进行计算,根据表1数据计算K值:
1.2倍过载时:
K=(1.22-1)×1200=528
1.5倍过载时:
K=(1.52-1)×180=225
二者取小,则K=225。
由此我们可以反推2倍、3倍、4倍、5倍等其他倍数的过载保护时间,如3倍电流过载的保护时间则为:
在变化过载电流条件下,为了在微机中实现电动机过载保护的计算,我们可以对K值进行累加计算,在微机上的ST语言代码表达如下:
IFNum<5THEN
Num:=Num+1;
Current_real_sum:=Current_real_sum+Current_real;
END_IF
IFNum=5THEN
Current_real_average:=Current_real_sum/Num
(*计算5个数据采集周期内的电流平均值,5可调*)Multiple_current:=(Current_real_average/Current_rated)
K1:=(Multiple_current*Multiple_current-1)*Num*Cycle;
K:=K+K1;
Num:=0;
Current_real_sum:=0;
END_IF(*计算K值*)
IFK>225THEN
Motor_stop:=TRUE;
END_IF
IFK<0THEN
K:=0
END_IF(*电动机停止*)
IFResetTHEN
Motor_stop:=FALSE;
END_IF(*复位*)
备注:Num―计数,初始值为0;Current_real―实时电流;Current_real_sum―实时电流求和;Current_real_average―时间元内的电流平均值;Multiple_current―电流倍数;Current_rated―额定电流;Cycle―实时电流的采集周期;K1―K值计算的中间变量;K―过载K值累加值,初始值为0。
考虑到计算量的问题,所以引入了Current_real_average―时间元内的电流平均值,如果微机计算能力允许的话,时间元应尽量取小,时间元越小则计算结果越真实准确,直接取数据采集周期Cycle的大小,此时Num取1。
3.安科瑞智能电动机保护器介绍
3.1产品介绍
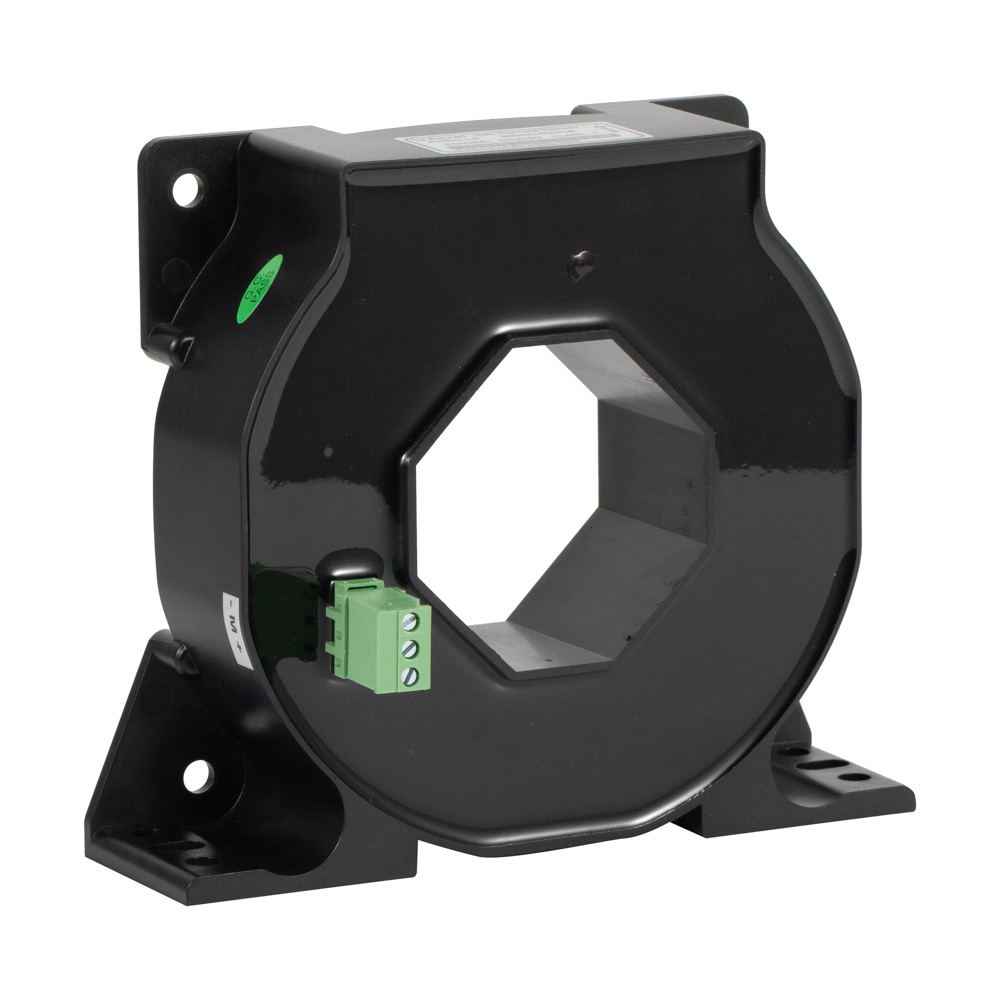
智能电动机保护器(以下简称保护器),采用单片机技术,具有抗干扰能力强、工作稳定可靠、数字化、智能化、网络化等特点。保护器能对电动机运行过程中出现的过载、断相、不平衡、欠载、接地/漏电、堵转、阻塞、外部故障等多种情况进行保护,并设有SOE故障事件记录功能,方便现场维护人员查找故障原因。适用于煤矿、石化、冶炼、电力、以及民用建筑等领域。本保护器具有RS485远程通讯接口,DC4-20mA模拟量输出,方便与PLC、PC等控制机组成网络系统。实现电动机运行的远程监控。
3.2技术参数
3.2.1数字式电动机保护器
4结束语
对于掘进机电动机的过载保护,宜采用反时限保护的思想。本文引入电流―时间关系式,对关系式中的K值进行累加计算,当K值超过限值时即发出电动机保护指令,从而将该控制思想融入到了微机上的实际算法中。该算法相较于传统的分段式算法更为准确,特别是对于动态过载的情况,其效果尤为明显。
参考文献
[1] 郑蔚,温佶强,王宁.数字式电动机过热保护的整定计算[J].浙江电力,2007,26(4):30-31.
[2] 朱军帅,陈辉.掘进机电动机过载保护的算法优化
[3] 安科瑞企业微电网设计与应用手册.2020.06版
作者简介:王蒙蒙,女,安科瑞电气股份有限公司,主要研究方向为智能电网供配电
摘要:对于掘进机电动机的过载保护,宜采用反时限保护的思想,为在微机计算中实现该思想,引入电流―时间关系式,从而引入发热常数K;然后根据少量已知的电动机过载保护要求,求得K值的保护限值;对K值进行累加计算,当K值超过限值时即发出电动机保护指令。现对优化后的微机算法代码进行举例说明,该算法相较于传统的分段式算法更为准确,特别是对于动态过载的情况,其效果尤为明显。
关键词:电动机;过载;微机;反时限;算法
0引言
对电动机的保护应将温度保护和热(电流)保护两者结合,组成温度―电流保护,这是一种比较理想的过负荷保护方式。目前,以微机为基础的热(电流)保护,以其处理数据灵活、适用范围广等特点,得到了越来越广泛的应用。本文主要讨论以微机为基础的悬臂式掘进机的电动机热(电流)保护算法。
1标准算法
矿用悬臂式掘进机电控系统执行标准《悬臂式掘进机电气控制设备》(MT/T971―2005),其中要求对掘进机电动机的过载短路保护应符合表1的规定。
表1
若按照表1所列数据执行,对于1.20倍过载保护和1.50倍过载保护,在微机上的ST语言代码表达如下:
IFCurrent_real>(Current_rated*1.20)THEN
Mid_120:=TRUE;
ELSE
Mid_120:=FALSE;
END_IF
TON_120(IN:=Mid_120,PT:=T#1200S);
IFTON_120.QTHEN
Overload_current_120:=TRUE;
END_IF(*1.2倍过载1200s*)
IFCurrent_real>(Current_rated*1.50)THEN
Mid_150:=TRUE;
ELSE
Mid_150:=FALSE;
END_IF
TON_150(IN:=Mid_150,PT:=T#180S);
IFTON_150.QTHEN
Overload_current_150:=TRUE;
END_IF(*1.5倍过载180s*)
IFOverload_current_120OROverload_current_150THEN
Motor_stop:=TRUE;
ELSE
Motor_stop:=FALSE;
END_IF(*过载后电动机停止*)
IFResetTHEN
Overload_current_120:=FALSE;
Overload_current_150:=FALSE;
END_IF(*复位*)
备注:Current_real―实时电流;Current_rated―额定电流(整定电流);Mid_120―1.2倍过载计算的中间变量;Overload_current_120―1.2倍过载;Motor_stop―电动机停止;Reset―复位。
对于表1所述及其在微机上的算法,有两个问题:
(1)在1.5倍至6倍过载之间,数据缺失,没有2倍、3倍、4倍、5倍等过载的动作时间。
(2)算法不够合理。掘进机负载是一直变化的,电流也随之变化,过载倍数也是一直变化的,那么过载保护的时间也应当是实时变化的,上文分段式算法无法准确反映动态过载的情况。
2算法优化
对于电流频繁变化的电动机宜采用反时限电流保护。采用反时限电流保护方法,首先要建立电流―时间的关系式。
电动机短时过负荷时,发热时间短,发热量大,电动机绕组在发热时与铁芯间存在热绝缘,且铁芯质量大而发热缓慢,所以短时过负荷状态的电动机的发热状态应由绕组发热时间常数T′决定。
额定稳态后的过载保护时间可用下式表示:
式中,t为额定稳态后的过载保护时间(s);θn为额定稳态温升(℃);Δθ为超出θn的温升(℃);Tn′为额定稳态时的绕组发热时间常数(s);IZ为电流倍数,IZ=I/In。
变形得:
令:
则过载电流倍数与保护时间的关系式为:
K=(IZ2-1)t
采用反时限过流保护算法时,绕组发热时间常数T′一般应由电动机制造商提供,但国内制造商一般都不提供此数据,我们可以根据制造商提供的其他数据或相应标准来计算。
有多种方法可以计算K值大小,我们可以根据已知的电动机过载负荷能力对K值进行计算,根据表1数据计算K值:
1.2倍过载时:
K=(1.22-1)×1200=528
1.5倍过载时:
K=(1.52-1)×180=225
二者取小,则K=225。
由此我们可以反推2倍、3倍、4倍、5倍等其他倍数的过载保护时间,如3倍电流过载的保护时间则为:
在变化过载电流条件下,为了在微机中实现电动机过载保护的计算,我们可以对K值进行累加计算,在微机上的ST语言代码表达如下:
IFNum<5THEN
Num:=Num+1;
Current_real_sum:=Current_real_sum+Current_real;
END_IF
IFNum=5THEN
Current_real_average:=Current_real_sum/Num
(*计算5个数据采集周期内的电流平均值,5可调*)Multiple_current:=(Current_real_average/Current_rated)
K1:=(Multiple_current*Multiple_current-1)*Num*Cycle;
K:=K+K1;
Num:=0;
Current_real_sum:=0;
END_IF(*计算K值*)
IFK>225THEN
Motor_stop:=TRUE;
END_IF
IFK<0THEN
K:=0
END_IF(*电动机停止*)
IFResetTHEN
Motor_stop:=FALSE;
END_IF(*复位*)
备注:Num―计数,初始值为0;Current_real―实时电流;Current_real_sum―实时电流求和;Current_real_average―时间元内的电流平均值;Multiple_current―电流倍数;Current_rated―额定电流;Cycle―实时电流的采集周期;K1―K值计算的中间变量;K―过载K值累加值,初始值为0。
考虑到计算量的问题,所以引入了Current_real_average―时间元内的电流平均值,如果微机计算能力允许的话,时间元应尽量取小,时间元越小则计算结果越真实准确,直接取数据采集周期Cycle的大小,此时Num取1。
3.安科瑞智能电动机保护器介绍
3.1产品介绍
智能电动机保护器(以下简称保护器),采用单片机技术,具有抗干扰能力强、工作稳定可靠、数字化、智能化、网络化等特点。保护器能对电动机运行过程中出现的过载、断相、不平衡、欠载、接地/漏电、堵转、阻塞、外部故障等多种情况进行保护,并设有SOE故障事件记录功能,方便现场维护人员查找故障原因。适用于煤矿、石化、冶炼、电力、以及民用建筑等领域。本保护器具有RS485远程通讯接口,DC4-20mA模拟量输出,方便与PLC、PC等控制机组成网络系统。实现电动机运行的远程监控。
3.2技术参数
3.2.1数字式电动机保护器
4结束语
对于掘进机电动机的过载保护,宜采用反时限保护的思想。本文引入电流―时间关系式,对关系式中的K值进行累加计算,当K值超过限值时即发出电动机保护指令,从而将该控制思想融入到了微机上的实际算法中。该算法相较于传统的分段式算法更为准确,特别是对于动态过载的情况,其效果尤为明显。
参考文献
[1] 郑蔚,温佶强,王宁.数字式电动机过热保护的整定计算[J].浙江电力,2007,26(4):30-31.
[2] 朱军帅,陈辉.掘进机电动机过载保护的算法优化
[3] 安科瑞企业微电网设计与应用手册.2020.06版
作者简介:王蒙蒙,女,安科瑞电气股份有限公司,主要研究方向为智能电网供配电
 扫一扫,手机浏览
扫一扫,手机浏览 安科瑞电气股份有限公司13611965514内容声明:谷瀑为第三方平台及互联网信息服务提供者,谷瀑(含网站、客户端等)所展示的商品/服务的标题、价格、详情等信息内容系由店铺经营者发布,其真实性、准确性和合法性均由店铺经营者负责。谷瀑提醒您购买商品/服务前注意谨慎核实,如您对商品/服务的标题、价格、详情等任何信息有任何疑问的,请在购买前通过谷瀑与店铺经营者沟通确认;谷瀑上存在海量店铺,如您发现店铺内有任何违法/侵权信息,请在谷瀑首页底栏投诉通道进行投诉。安科瑞电气股份有限公司 电话:021-69153629 手机:13611965514 地址: 上海市嘉定区育绿路253号
安科瑞电气股份有限公司13611965514内容声明:谷瀑为第三方平台及互联网信息服务提供者,谷瀑(含网站、客户端等)所展示的商品/服务的标题、价格、详情等信息内容系由店铺经营者发布,其真实性、准确性和合法性均由店铺经营者负责。谷瀑提醒您购买商品/服务前注意谨慎核实,如您对商品/服务的标题、价格、详情等任何信息有任何疑问的,请在购买前通过谷瀑与店铺经营者沟通确认;谷瀑上存在海量店铺,如您发现店铺内有任何违法/侵权信息,请在谷瀑首页底栏投诉通道进行投诉。安科瑞电气股份有限公司 电话:021-69153629 手机:13611965514 地址: 上海市嘉定区育绿路253号